TECHNOLOGY 02MAPPING
センサーを活用して実世界の地図データを構築する技術は、
自動運転システムやロボティクス分野での鍵となります。
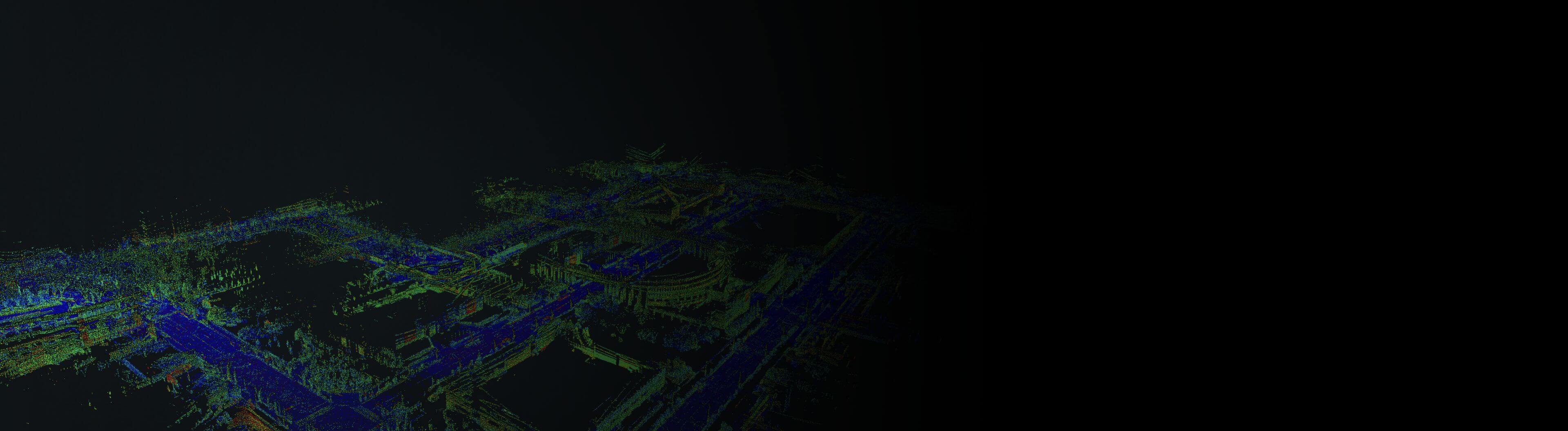
- 中でも、LiDAR SLAM技術は、この地図作成技術の核心となります。
SLAM(Simultaneous Localization and Mapping)は、ロボットや車が動いている環境内で、自身の位置や向き(位置姿勢推定)をリアルタイムで把握しながら、その環境の地図を同時に作成する技術です。 -
マップフォーのLiDAR SLAM技術は、その優れた特性により業界内で評価を得ています。
具体的には:
– GPUを活用したスキャンマッチングによる高速データ処理
– スキャンデータの歪み補正による、鮮明な3D点群生成
– IMU、GNSS、ホイールエンコーダを組み合わせて位置推定の相対・絶対精度を向上させるセンサーフュージョン技術 - これらの技術革新により、従来、専用の高価な測量機器でしか達成できなかった高精度な地図作成を、自社のSLAM技術で実現しました。
LOCALIZATION
Localization技術は、センサー情報や地図データを参照し、
自己位置を高精度で推定する技術です。
-
マップフォーでは、大きく分けて2つの位置推定技術を開発し、アプリケーションへの適合を進めています:
-
(1) 3次元地図と3D LiDARのスキャンマッチング
事前にMapping技術を使用して作成された3次元地図に対して、リアルタイムなLiDARデータを照合することにより位置推定をする技術です。
この技術により、位置推定の誤差をセンチメートル単位まで抑えることができます。
特に、複雑な道路環境や混雑した都市部における自動運転や、自律移動ロボットの高精度な制御に活用できます。
(2) GNSS/IMU複合航法
GNSS、IMU、および車速の情報を統合して位置姿勢を推定するこの技術は、大学との共同研究を通じて培ったセンサーデータ補正技術を活用しています。
これにより、従来、高価なセンサーが必要であった高精度な位置推定を、低コストのセンサーだけで実現することができます。
さらに、上記の3D LiDAR技術と組み合わせることで、従来では位置推定が困難と思われていた環境下でも、精度と信頼性の高い位置推定が可能になりました。