Eagleyeについて
Eagleyeは、GNSSとIMU(慣性計測装置)を活用した車両向け複合航法システムです。
Eagleyeでは、GNSS、IMU、車速センサーといった複数のセンサーを併用することで、GNSSの不可視環境やマルチパス発生環境においても、安定して高精度な自己位置・姿勢推定をすることができます。
※Eagleyeは、オープンソース自動運転ソフトウェア「Autoware」(https://autoware.org/autoware-overview)とも連携が可能です。
※Eagleyeは、マップフォーと名城大学 目黒研究室で共同開発されたものです。
ソースコードはOSSとしてhttps://github.com/MapIV/eagleyeで公開されています。
複合航法システムとは
複合航法システムは、慣性航法システム(INS)と、GNSSなど複数の異なる航法センサーや技術を組み合わせることで、単一のセンサーを使用した位置推定よりも精密な位置情報を計算します。
これは、センサーの種類によって得られる情報が異なることから、それらを統合することで各センサーが得意としない条件下での情報収集の誤差を補完し合えるためです。
複合航法システムの活用例
どんな条件下でも精密な位置推定が求められる移動体に活用されています。
例えば、構造物内でGNSSが利用できない状況下での正確な自己位置推定とナビゲーションに使われます。

トンネル内での
自動運転車両のナビゲーション

工場内での自律移動ロボットの
自己位置・姿勢推定

建設機械や鉱山機械の
位置・姿勢制御
Eagleyeの特徴
低価格で高いコストパフォーマンス
従来、衛星測位を利用した高精度な自己位置推定を実現するためには、高価なGNSSとIMU(加速度計+ジャイロセンサ)が必要でした。
Eagleyeでは、安価なGNSS受信機、IMUを用いて自己位置推定を行う独自開発のアルゴリズムを使用することで、低価格で高精度な位置推定が可能です。

多様なセンサー機種をサポート
多種多様なGNSS、IMUの機種に対応しています。車速は、OBD-IIから取得するCAN信号、車速パルス、レーザードップラー車速計のデータに対応しています。
安定した高精度位置推定性能
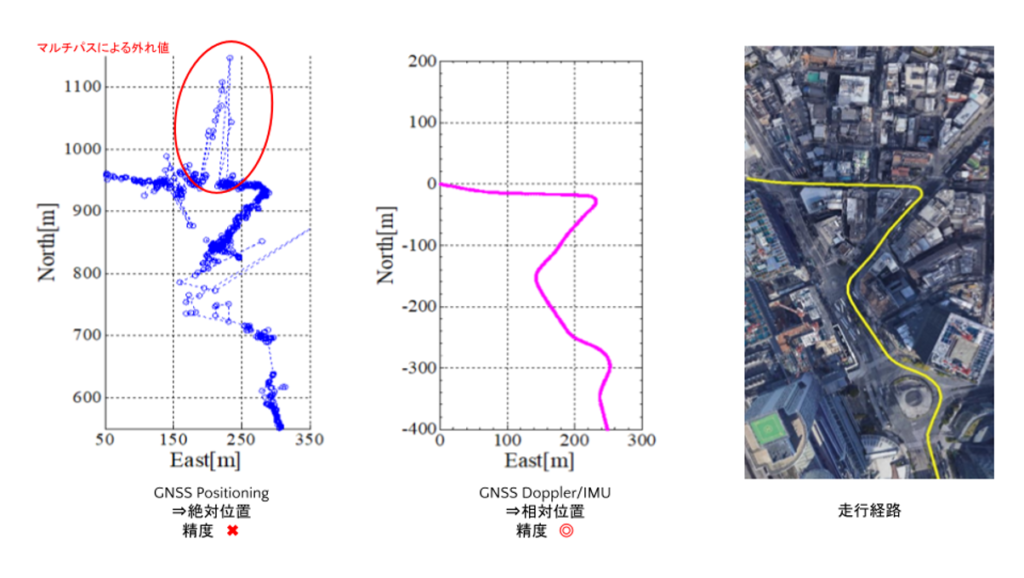
RTKなしでも、都市部において相対位置は0.5m以下/100m、絶対位置は1.5m(レーン判別可能)の精度で位置推定が可能です。都市部やトンネル内など電波状況の悪い環境でも、計測条件に応じて次のようなオプションで高い位置推定精度を維持できます。
① GNSSとIMUの併用
GNSSから得られる絶対位置とGNSSドップラー / IMUを用いて推定した相対軌跡を統合し、マルチパスによる外れ値を排除することで高い精度で絶対位置推定できます。
② GNSSドップラー速度を使用
GNSSドップラー速度を使用することで車速センサーのスケールファクター誤差とIMUセンサーのオフセット誤差を補正できます。
Eagleye ECUについて
オープンソースGNSS/IMU複合航法システム「Eagleye」を動作させるためのセンサーと処理ECUをセットにした「Eagleye ECU」を使うことで、単体でEagleyeの処理結果を出力できるようになります。
GNSS、IMU、CANデータの取得からEagleyeによる自己位置推定までワンストップでご利用いただけます。

サポート体制
Eagleyeでは、ユーザーの特定の使用環境やアプリケーションに適したカスタマイズができるオプションを提供しています。
社内に導入ノウハウがない場合でも、ぜひご相談ください。
 " alt="">
" alt="">