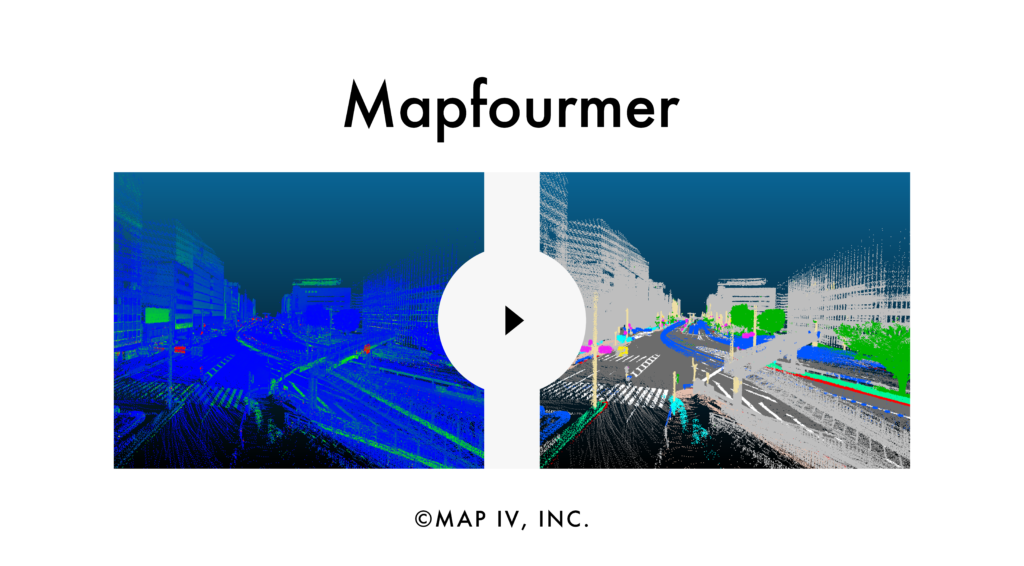
About Mapfourmer
Mapfourmer automatically analyzes and classifies point cloud data. It achieves highly accurate classification by leveraging the latest 3D Sparse Transformer technology in deep learning.
Automating classification and dynamic obstacle noise removal helps reduce the workload and cost of map creation.Mapformer is compatible with 3D point cloud data from various sources, including ground-based laser scanners, surveying capture devices, mobile mapping systems, and other point cloud processing software. It also supports point cloud data captured by both the vehicle and mobile versions of SEAMS and processed by MAP IV Engine.
Point Cloud Classification Process

The first step involves capturing real-world data using a 3D measurement system.
The second step requires processing the captured data from 1st step using mapping software and obtaining a 3D point cloud map.
Finally, the 3D point cloud map will be processed using Mapfourmer to classify all the points based on the desired predefined classes.
Two Processing Modes
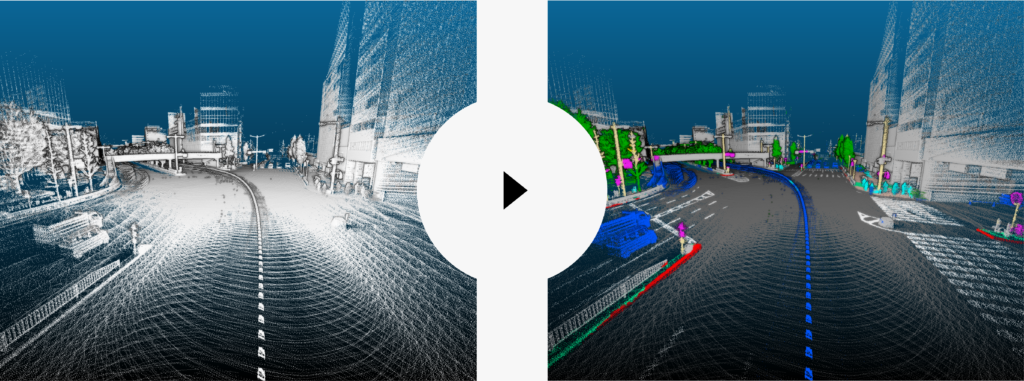
Classification Mode
This mode allows the software to categorize each point in the point cloud into predefined classes. This point cloud classification can then be used to extract point clouds of specific classes, such as utility poles or power lines.
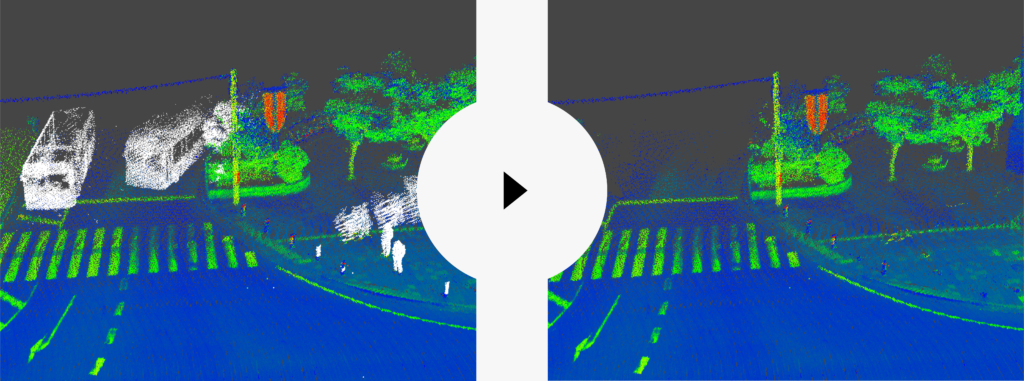
Noise Removal Mode
This mode allows the software to categorize each point in the point cloud into predefined classes. The point cloud is then divided into noise and non-noise classes. Dynamic objects, such as people and vehicles, can be classified as noise and automatically removed using the noise removal mode.
Workload Reduction Achieved by Implementing Mapfourmer
Mapfourmer achieved an average accuracy of over 93% in class classification tasks. It also reduced total work hours by 54–72% compared to manual classification and noise removal, significantly improving efficiency.
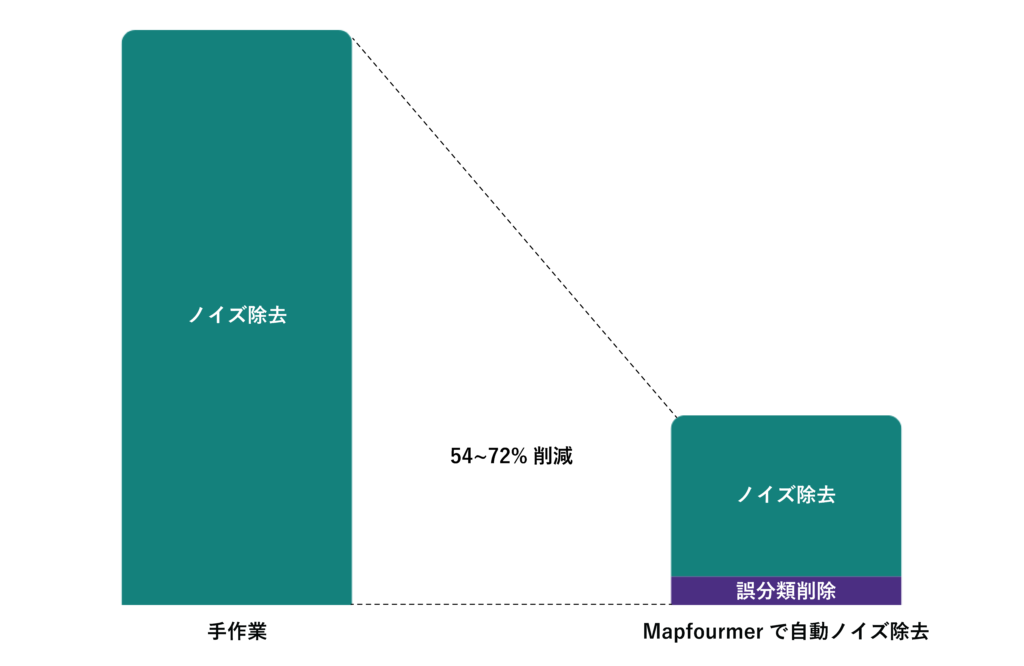
※This result is based on the performance of our map data creation team using Mapfourmer. Results may vary depending on the map data environment and the conditions of the class classification model used.
Applications of Mapfourmer
Mapfourmer automates pipeline sections required for accurate map data creation for autonomous driving and surveying. It can also be used for infrastructure inspections in power lines, railway, and municipal sectors, improving accuracy and reducing costs.
1 : For the power and railway industries
Obstacle Clearance Distance Detection
Mapfourmer can automatically identify and extract obstacles, such as vegetation, that encroach on power lines, transmission lines, and overhead lines. The results can be used to issue proximity alerts when the clearance distance falls below a predefined threshold. The system also changes the color of encroaching objects to provide a visual warning.
Pole Tilt Detection
Mapfourmer automatically classifies and extracts objects such as utility, overhead, and signal poles. This data can be used to identify if the poles whose tilt exceeds the predefined threshold relative to the gravitational direction. The system automatically changes the color and outputs a tilt alert.

2 : For railway and surveying applications
Obstacle Detection for Sidewalks, Roadways, and Railways
Mapfourmer automatically identifies and extracts obstacles that encroach on passageways used by pedestrians, bicycles, vehicles, and trains. For example, any objects installed below a predetermined height threshold on sidewalks, bicycle lanes, roadways, and railways will be extracted.
The results obtained by Mapfoutmer can be used to provide proximity alerts. Based on pre-set clearance conditions for each object type, it will automatically change color and warn when an obstacle is detected within a specified range.